SZTE Robot Kupa 2022
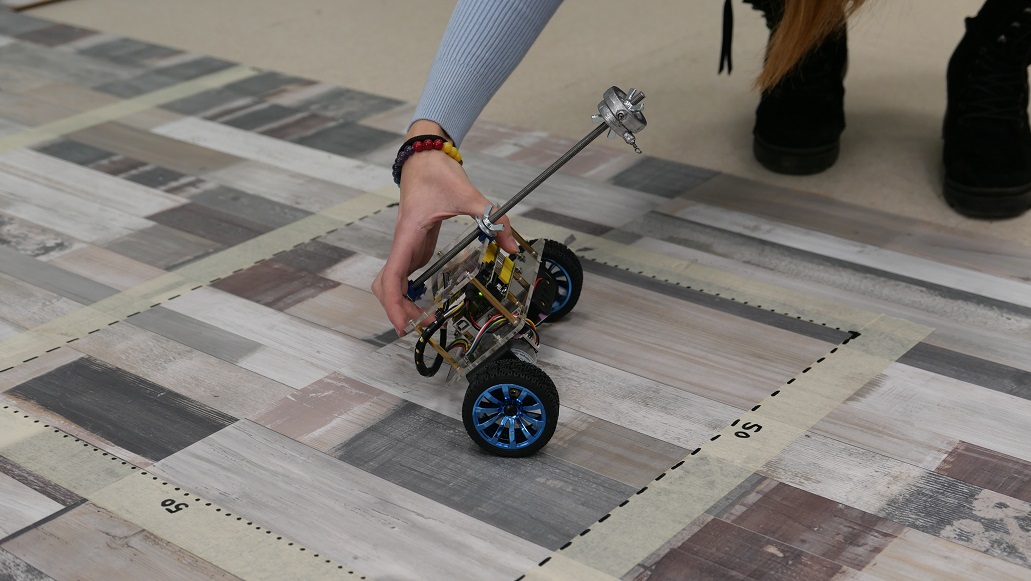
Egyensúlyozó-robot programozó verseny az SZTE hallgatóinak, 500.000Ft összdíjazással.
A verseny a DARPA Design.R - AI assisted CPS design projekt keretében valósul meg
Discord szoba
Discord szoba 4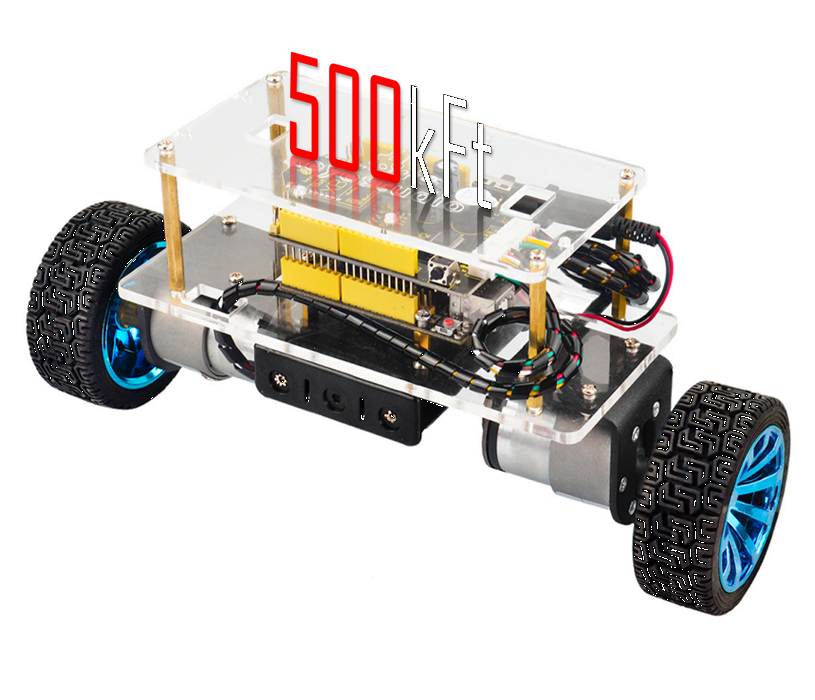
A verseny a DARPA Design.R - AI assisted CPS design projekt keretében valósul meg
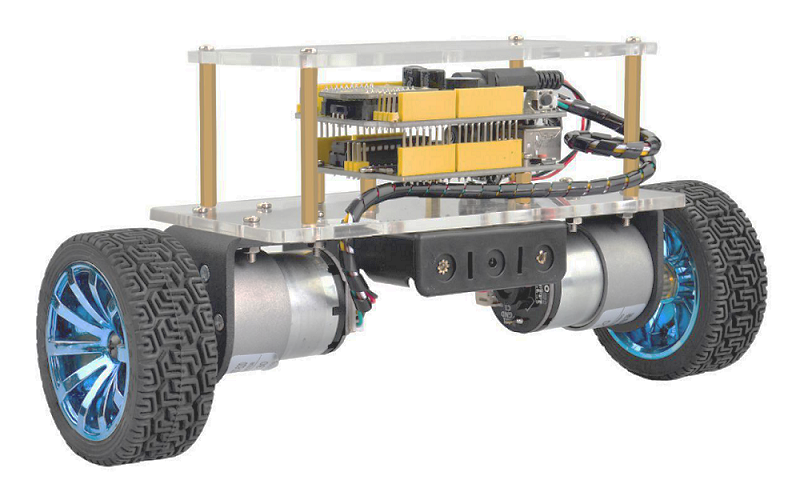
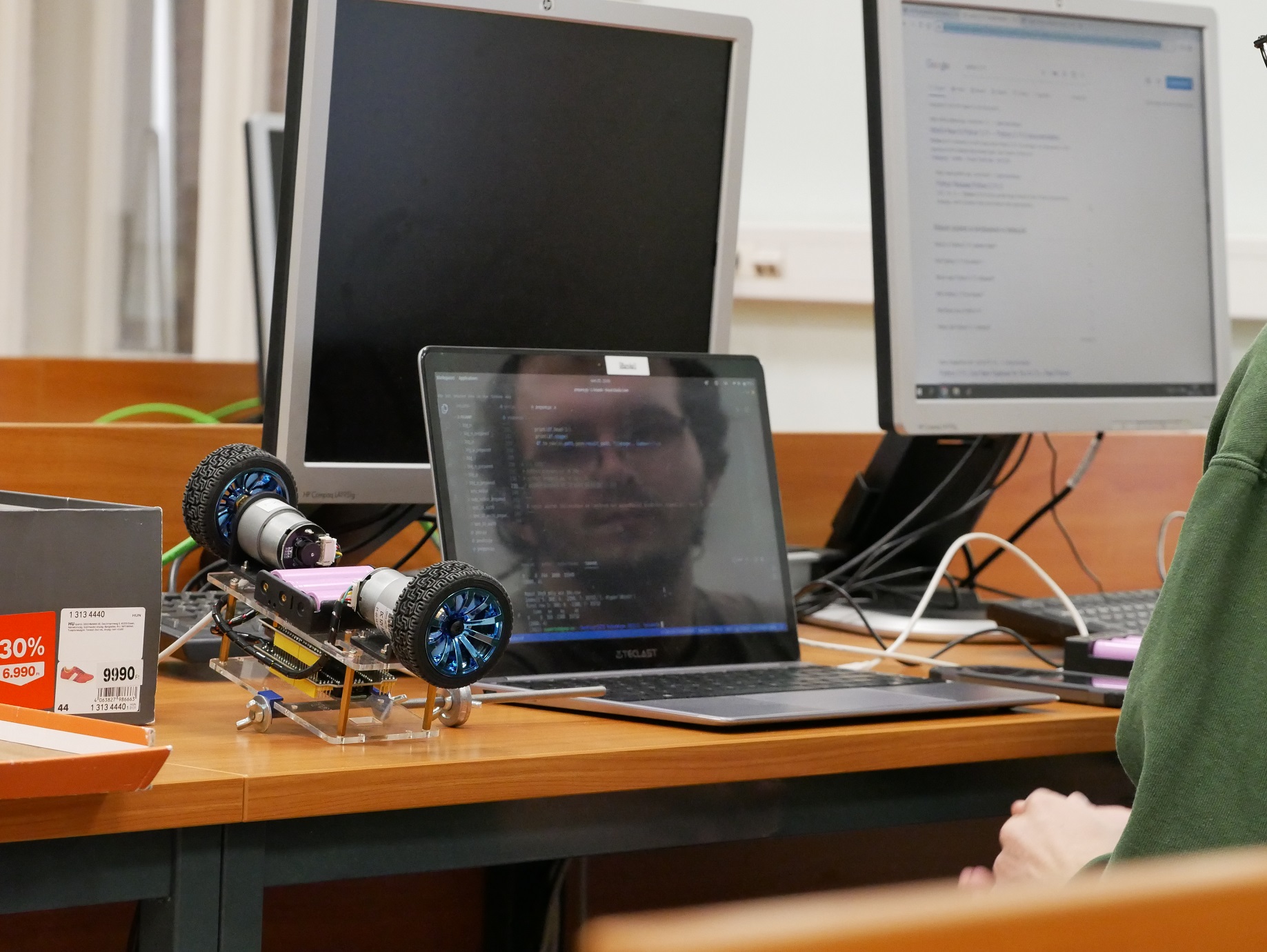
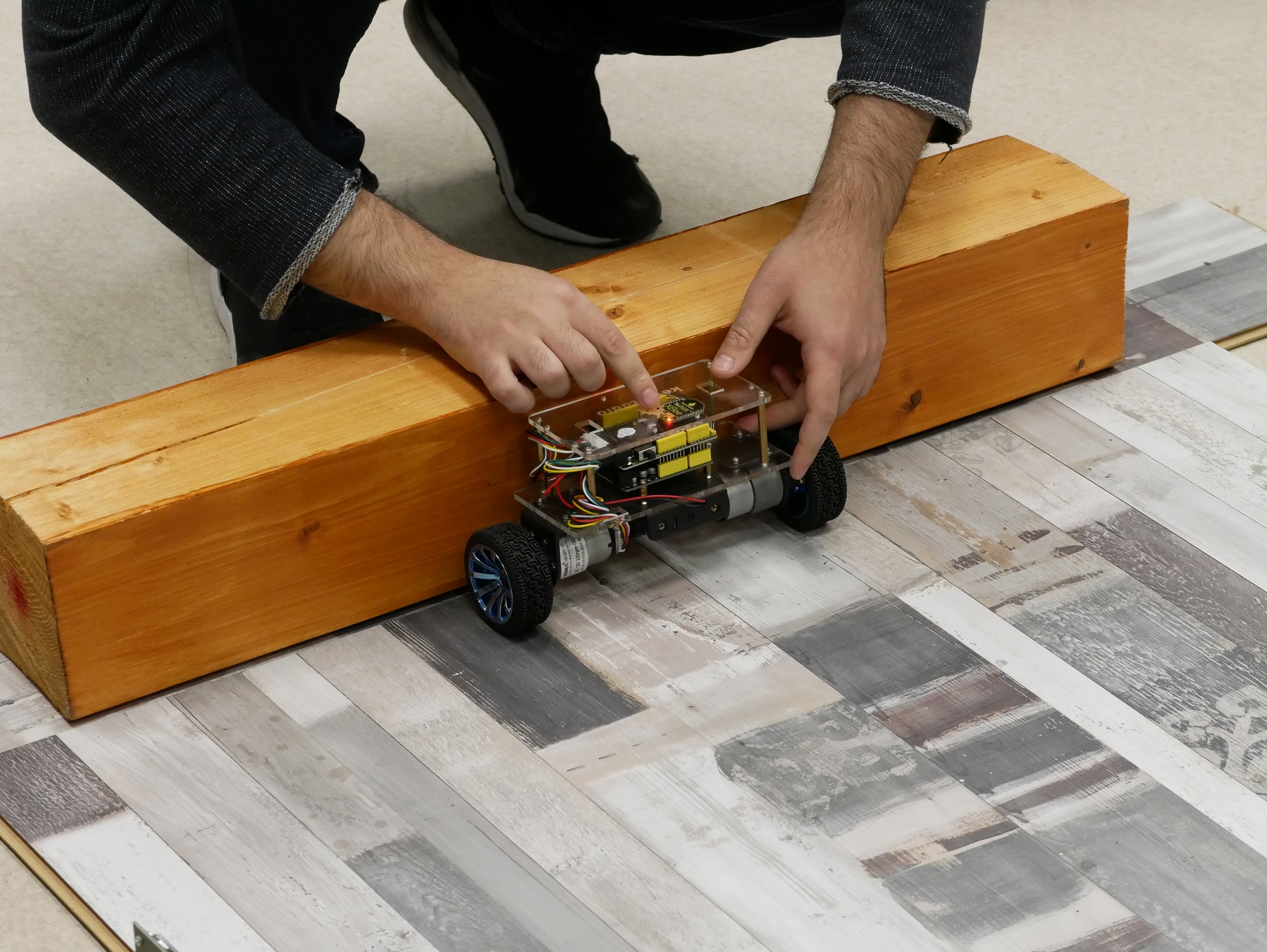
A gyorsulásmérő adatait és a motorok vezérlését egy Arduino UNO mikrovezérlő végzi, amelyet az Arduino környezetből egyszerűen lehet programozni.
A robot dőlését egy MPU-6050 gyorsulásmérővel lehetséges nyomonkövetni. Beavatkozásra két 12V-os, enkóderrel is rendelkező DC motor használható.
Három darab 18650-es akkumulátorral rendelkezik. A robot mellé a csapatok három elemet és töltőt is kapnak.
Varga Csilla,
Dani István,
Kovács Eszter mérnökinformatikus BSc, 3. évfolyam
Juhász Dániel, SZTE PTI MSc 1. évfolyam
Hajnal Péter, SZTE PTI MSc 1. évfolyam
Szabó Dániel, Mérnökinformatikus BSc, 5 Szabó Balázs, Fizika MSc, 1
Tóth Marcián, Villamosmérnök, 1. évfolyam
Schröffel Bertalan (vill. m. ; gólya)
Számel Tamás, programtervező informatikus, III. évfolyam Régaisz Olivér, programtervező informatikus, II. évfolyam
Koza Attila, villamosmérnök, harmadéves,
Németh Ágnes Sára, villamosmérnök, harmadéves
Török Gergő, Programtervező informatikus, 1.évfolyam
Német Tímea Kata, Programtervező informatikus, 1.évfolyam
Subicz Máté István, Programtervező informatikus, 1. évfolyam
Guczi Ádám László, Mérnökinformatika BSc, 1. Ágoston Sándor, Mérnökinformatika BSc, 1. Francia Csaba, Mérnökinformatika BSc, 1.
A versenyfeladatok kezdeti leírása az alábbi linken érhető el:
Verseny feladatok
Egy vízzel töltött műanyag palackot helyezve a robot felső platformjára mutass be egy vicces/érdekes mutatványsort. Az "előadásról" készíts videófelvételt. Az így készült felvételeket a verseny facebook oldalán megosztjuk és a legtöbb Like-ot szerző videó tulajdonosa a verseny végeztével megkapja a közönségdíjat - megtarthatja a robotot!

1. helyezés

2. helyezés

3. helyezés

4. helyezés








1. helyezés

2. helyezés

3. helyezés
4. helyezés