Bartha Ferenc
(Szegedi Tudományegyetem, Bolyai Intézet)
Global stability in a system using echo for position control
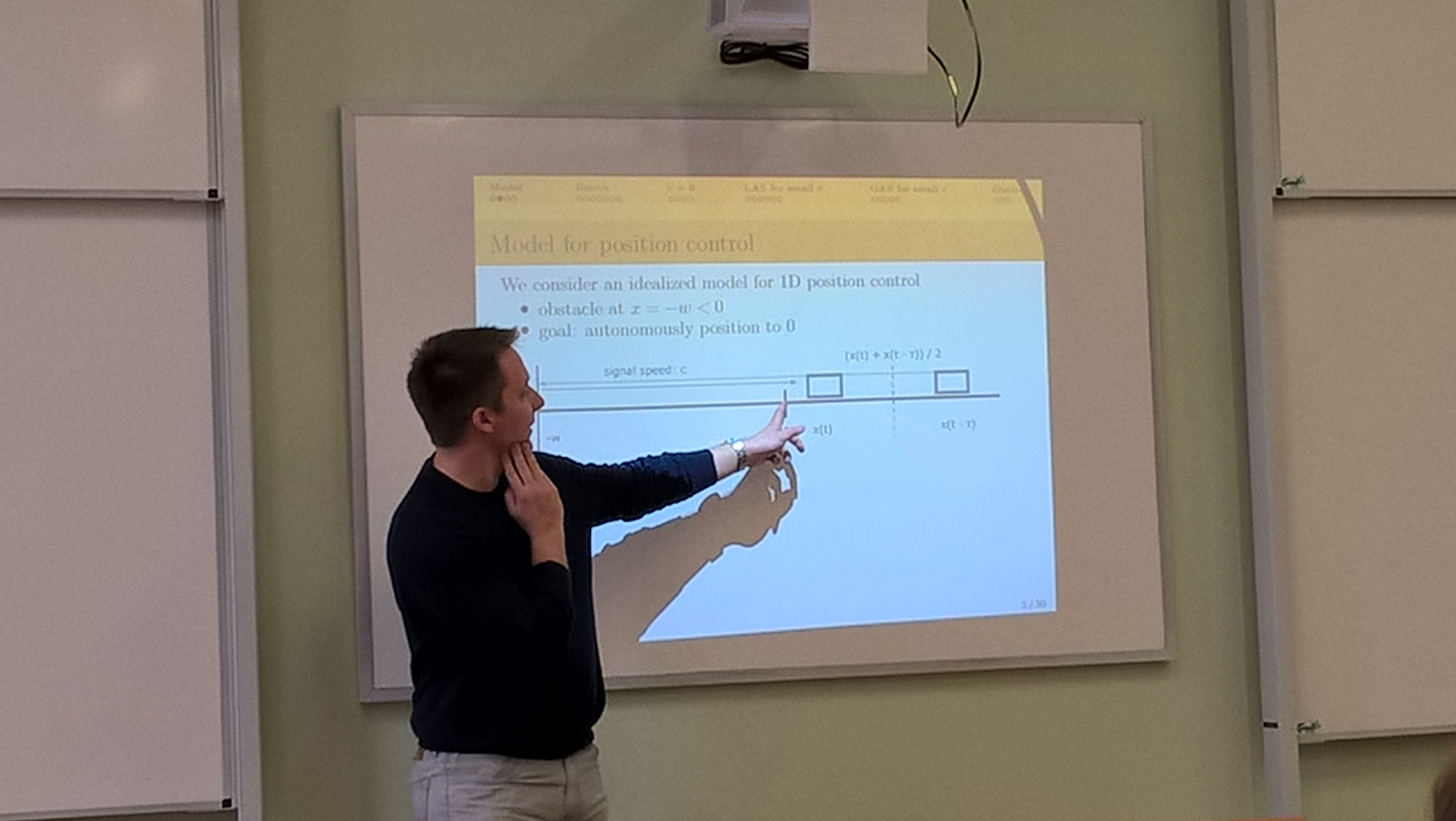
Absztrakt: We consider a system of equations describing automatic position control by echo. The system can be reduced to a single differential equation with state-dependent delay. The delayed terms come from the control mechanism and the reaction time. H.-O. Walther proved that stable periodic motion is possible for large enough reaction time. We show that, for sufficiently small reaction lag, the control is perfect, i.e., the preferred position of the system is globally asymptotically stable.